■モータードライブと電源供給 |
|
■MT−1/SD−1&DD−1
 |
| ステッピングモーター MT-1 |
 |
| プラグの極性を中が−、外が+に改造 |
GPガイドパックは1軸モーターでしたが、手動で赤緯体を操作するとどうしてもガイドエラーを招きます。
モーターをもうひとつ購入し、2軸モーターに変更。コントローラへの電源供給は単一電池8本使用しますが、ランニングコスト的に問題があり、低気温期の電源確保には不安があるので、12Vバッテリーを用いシガーライタケーブルで繋ぐように変更。
ビクセンの電源供給は一般的なシガーライタケーブルとは極性が逆。中がマイナス、外がプラスになっているので、半田ゴテで改造。
1.5倍、2倍、32倍の速度を選択できるが、32倍で動かしたあとはモードスイッチを1.5倍か2倍に戻して一旦ボタンを押して動かさなければ星が流れてしまう不具合があるようです。
 また、自動導入もできませんので、撮影対象をファインダーで正確に導入し、本を見ながら同定する必要があるので撮影に至るには非常に時間を要します。 また、自動導入もできませんので、撮影対象をファインダーで正確に導入し、本を見ながら同定する必要があるので撮影に至るには非常に時間を要します。
しかしスカイセンサー2000に用いられるモーターより、このMT-1のほうが追尾精度が良いとの情報も良く耳にします。これはモーターには低速回転が得意で追尾精度の高い「ステッピングモーター」と、高速回転が得意だが低速での追尾には劣る「DCモーター」があり、このMT-1は前者であり、スカイセンサー用のMT-4などは後者であるからです。
高速回転で自動導入という大きなメリットを得るには、追尾性能の大きな問題を抱えることも覚悟しないといけないようで、今後のメーカーの対策も望まれるところです。
|
■MT−2/VIXEN スカイセンサー2000PC ver.2.05
そしてその後スカイセンサー2000PCを購入。これで導入も楽々です。PCに繋いでみました。
 さすが速い。 さすが速い。
でも1200倍だと赤道儀への負担が大きそうなので800倍に落としました。
しかし、DCモーターは音がうるさい。追尾中もアイドリングのようにじじじじじじ・・と鳴りっ放し。ステッピングモーターのMT-1はときおりコンコンコン・・と音鳴るが、森の奥から聞こえてくるキツツキの音のように静かなものだった。
SS2000PCはコントローラで様々な設定ができますが、モーター取り付けの際のギア間の調整具合が難しく、バックラッシュ調整にはかなりの時間を費やしそうです。
また、PECの調整も、正確なガイディングを示してやる必要があるので、初期段階での手間は非常にかかります。
で、モーターを振ると中でカシャカシャ鳴るので調べてみると・・
 案の定、モーターカバーのツメは折れていました。^^; 案の定、モーターカバーのツメは折れていました。^^;
これは構造と材質に問題ありですよ、ビクセンさん。
SS2000PCに接続されるモーターについてですが、当方の使用しているMT−2のほか、MT−3、MT−4と、スカイセンサーのバージョンによって対応しているモーターが変わります。
MT−2とMT−4はメーカーが違うだけで全く同じ性能ですので問題ないでしょう。しかしMT−3はあまり性能が良くないようです。すぐにMT−4に変更になりました。
モーターとバージョンの対応はネットで調べたところ下の表のようになっているようです。 |
|
MT−1 |
MT−2 |
MT−3 |
MT−4 |
| スカイセンサー3S・3D |
○ |
× |
× |
× |
| スカイセンサー2000 |
× |
○ |
× |
○ |
| SS2000PC 2.06Verまで |
× |
○ |
× |
○ |
| SS2000PC 2.07〜9Ver |
× |
× |
○ |
× |
| SS2000PC 2.09Ver |
× |
△ |
○ |
△ |
| SS2000PC 2.10Ver |
× |
○ |
× |
○ |
|
また、スカイセンサー2000からPC対応へのバージョンアップはメーカーにて対応してくれるようですが、2万円ほどかかるようです。
|
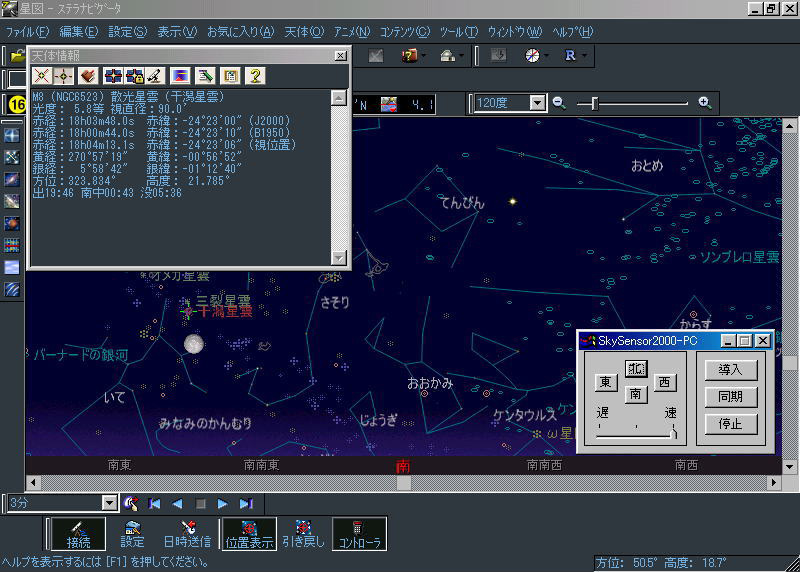
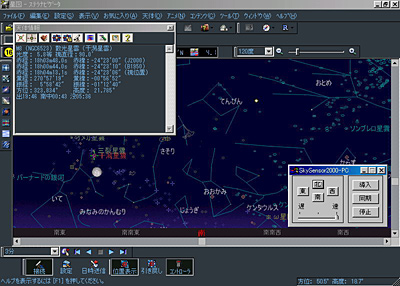 さて、赤道儀、スカイセンサー2000PC、PC、Qcam4000Proが繋がりました。PC制御自動導入とWebカメラによるオートガイドシステムがとりあえずは完成です。 さて、赤道儀、スカイセンサー2000PC、PC、Qcam4000Proが繋がりました。PC制御自動導入とWebカメラによるオートガイドシステムがとりあえずは完成です。
ステラナビゲータ7で望遠鏡制御を設定し、星図をクリックすることで対象を導入することが出来ます。
また、対象のない領域も導入することができます。これは要するにフレーミング時に中心となる部分を選択できるということ。非常に便利。
接続後は対象をクリックで選択し、導入をクリックで自動導入へ。そしてコントローラで望遠鏡の視野の中心に対象を持っていき、同期。この作業を2点すれば、アライメント完了。非常に正確に対象を導入することができます |
●スカイセンサー2000PCとPCの接続/ソフトの設定について
 SS2000PC用ケーブルはMIDI接続用の8PINですが、ローランドのものは入手しにくく、それにどうも電気店で市販されているものとは結線図を見ると少し違うようなので、結局誠報社で純正のものを購入。手持ちのノートPCはシリアルポートがないので秋月電子通商のUSB-RS232C変換ケーブルを用いてUSB接続します。 SS2000PC用ケーブルはMIDI接続用の8PINですが、ローランドのものは入手しにくく、それにどうも電気店で市販されているものとは結線図を見ると少し違うようなので、結局誠報社で純正のものを購入。手持ちのノートPCはシリアルポートがないので秋月電子通商のUSB-RS232C変換ケーブルを用いてUSB接続します。
秋月電子通商のUSB-RS232C変換ケーブルはドライバーソフト付きで破格の\1200。でも充分使えます。
市販のMIDIケーブルは、SS2000PCの説明書に書かれている結線図に加え、1-8、2-7の結線が余分です。これが接続にどう影響するかはわかりませんが・・とりあえず純正品なら間違いないだろうと思いました。
また制御用のPCには天体観測機器の統合制御ソフトASCOMもインストールしています。
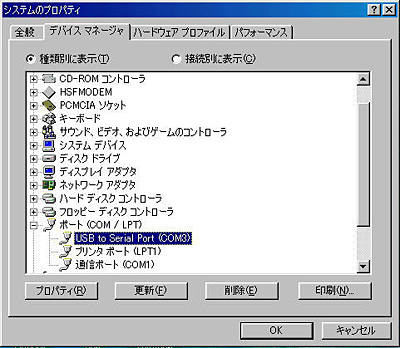
ケーブル接続後、デバイスマネージャを見ると、いつもどおりCOM3で認識しているようです。
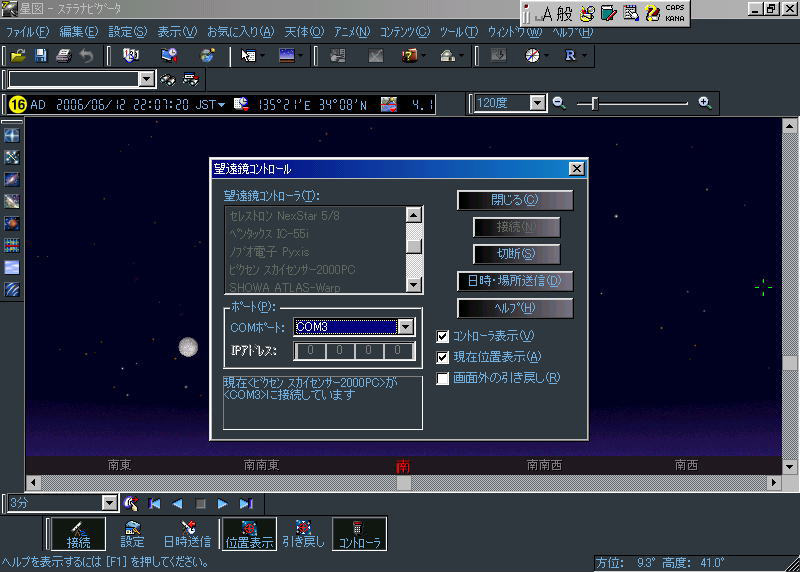
●ステラナビゲータ7の設定
 ソフトを起動し、ツール>望遠鏡コントロールをクリックすると設定ウィンドウが現れます。 ソフトを起動し、ツール>望遠鏡コントロールをクリックすると設定ウィンドウが現れます。
ビクセンスカイセンサー2000PC、それからデバイスマネージャどおりにCOM3を選択し、接続をクリックすると、「現在、<ビクセン スカイセンサー2000PCがCOM3に接続しています」と表示され、正常に接続されます。
|
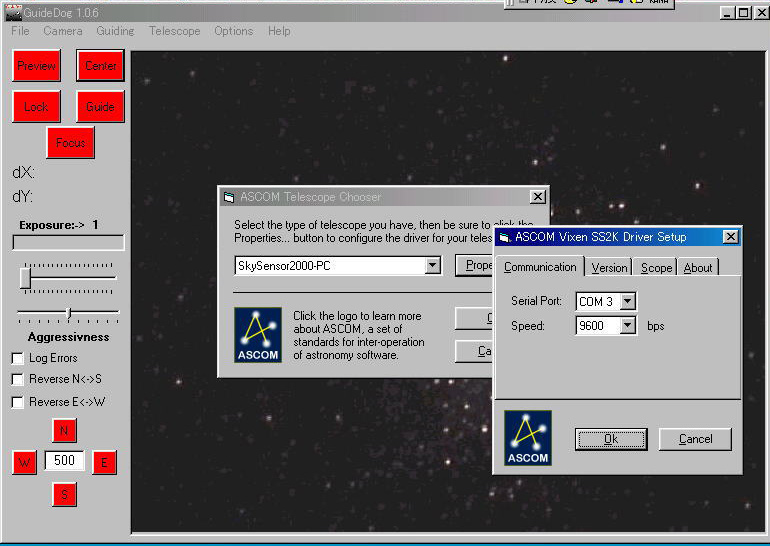
●GuideDogの設定
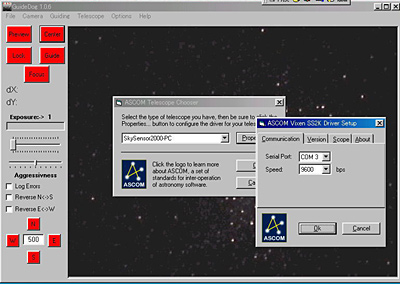 QcamPro4000を接続しないときちんと起動できません。 QcamPro4000を接続しないときちんと起動できません。
起動し、設定画面でスカイセンサー2000PCを選択し、バージョンを設定。下のようにデバイスマネージャに合わせてCOM3に設定すればOKでしょうか。間違ってたらごめんなさい。^^;
|
●ASTRO
SNAPの設定
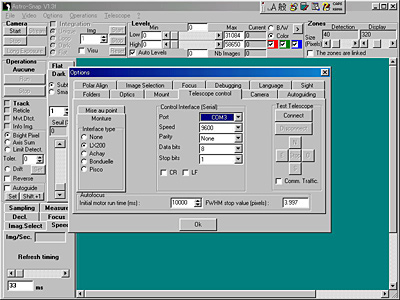 いちおうQcamを接続して設定画面を表示してみました。 いちおうQcamを接続して設定画面を表示してみました。
デバイスマネージャどおり、COM3に設定。
|
●スカイセンサー2000PCのトルクアップ
さて、次に挙げる表、実はこれはSS2000PCをトルクアップさせるための覚書なのです。
|
歯数 |
歯数 |
径 |
径 |
合計 |
ギア比 |
| 純正 |
40 |
40 |
30 |
30 |
60 |
1:1 |
|
30 |
45 |
22.5 |
33.75 |
56.25 |
1:1.5 |
| ○ |
32 |
48 |
24 |
36 |
60 |
1:1.5 |
|
32 |
56 |
24 |
42 |
66 |
1:1.75 |
|
24 |
48 |
18 |
36 |
54 |
1:2 |
|
25 |
50 |
18.75 |
37.5 |
56.25 |
1:2 |
| △ |
28 |
56 |
21 |
42 |
63 |
1:2 |
|
30 |
60 |
22.5 |
45 |
67.5 |
1:2 |
 SS2000PCをトルクアップさせるためのカスタマイズのご紹介です。 SS2000PCをトルクアップさせるためのカスタマイズのご紹介です。
このSS2000PCのVer.2.05に使われているMT-2 DCモーターは、SD-1やDD-1で使われるMT-1
ステッピングモーターに比べ、高速回転には強いものの低速ではやや力強さに劣ります。
特に天頂付近では、バックラッシュや機材のバランスとも相まって非常に不安定な動きをするようです。
そこで歯車を交換してギア比を変え、トルクを上げるカスタマイズをするのが賢明かと、こちらのウェブサイトで歯車を購入しました。
 納期5日とのことでしたが、驚くことに入金した次の日に早々と届きました。 納期5日とのことでしたが、驚くことに入金した次の日に早々と届きました。
どうやら規格品のようですね、在庫がたんまりあるのでしょうか。
歯車にはセットスクリュー(イモネジ)も付いていますので、買い足す必要もありませんでした。
こういった赤道儀用モーターのトルクアップのカスタマイズでは、協育歯車の名を良く聞きますので、まずは製作可能かどうかを問い合わせてみましたら、メールで詳細な図面を送ってくれました。でも価格はまたお問い合わせください・・という。
ちょっと時間がかかりそうなです・・。
図面を拝見すると、協育歯車ではB1型でも歯数48以上の大きい目のものが製作可能のようですので、スカイセンサー用MT-2〜MT-4でも歯数が30:60へのトルクアップや中型・大型の赤道儀カスタマイズをお望みの方には心強い味方になってくれそうです。
特にMT-3はMT-2・MT-4に比べてもトルクが低いようで、このカスタマイズは必要不可欠になるようですね。
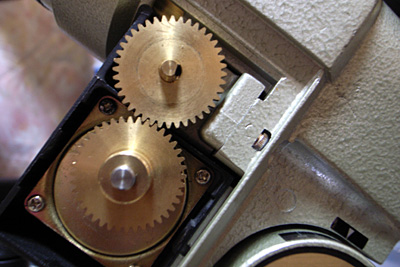 SS2000PCの購入時に同梱されている歯車はモジュール0.75、軸径6mmの歯数が40のものです。歯数40:歯数40で1:1のギア比になっています。 SS2000PCの購入時に同梱されている歯車はモジュール0.75、軸径6mmの歯数が40のものです。歯数40:歯数40で1:1のギア比になっています。
 今回購入した歯車は同じくモジュール0.75、軸径6mmで歯数32と歯数48のものです。 今回購入した歯車は同じくモジュール0.75、軸径6mmで歯数32と歯数48のものです。
歯数32:歯数48で1:1.5のギア比に替え、純正のものから1.5倍にトルクアップを図るわけです。
数年前の天ガに載っていたのは確か歯数36と45の組み合わせでした。これだと1:1.25というトルクアップになり、効果の程はどうだろう・・。できれば一気に1:2にしたかったのですが、恒星時追尾にモーターの回転数が倍になると電気の消耗も早そうですので1.5倍にしました。
ちなみに当然ながら導入速度がその分遅くなるのは否めません。
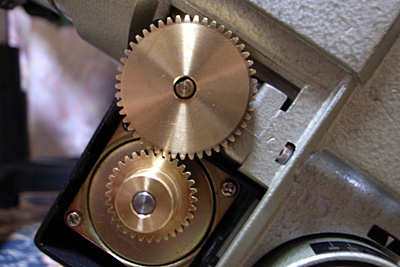 歯車を取り替えました。 歯車を取り替えました。
先に挙げた表をご覧になるとお判りになると思いますが、歯車の組み合わせによっては、数mm間が短いとギア同士がかみ合わなかったり、ギアが大きすぎて取り付けできなかったりするようです。購入時には歯車の寸法を充分に調べてからにするほうが良さそうです。
しかし今回は歯車と歯車の間の寸法が偶然にも純正と同じ60mmでしたので、歯車を取り替えるだけで済みました。赤緯側のバックラッシュを幾分少なくするためにモーターの位置を修正したくらいです。
歯数48ではモーターカバーからはみ出してしまうので、カバーに穴を開けます。
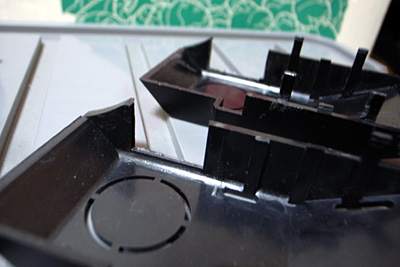 かなり苦労するだろうな・・と予想していたのですが、カッターでいとも簡単に切り取れました。 かなり苦労するだろうな・・と予想していたのですが、カッターでいとも簡単に切り取れました。
 このとき気付いたのですが、この歯数48のギアがちょうどはみ出る、切り取らなければならない部分だけ、カバーの厚みが薄くなっているのです。もしやビクセンはこういったトルクアップのカスタマイズを予想してカバーを作成しているのではないでしょうか。 このとき気付いたのですが、この歯数48のギアがちょうどはみ出る、切り取らなければならない部分だけ、カバーの厚みが薄くなっているのです。もしやビクセンはこういったトルクアップのカスタマイズを予想してカバーを作成しているのではないでしょうか。
・・というより、もしかするともともとビクセンは今回のような1:1.5のギア比で世に出そうとしていた可能性もあるのではないでしょうか。
赤経部のカバーはギアが干渉しているので、若干ヤスリで削りました。
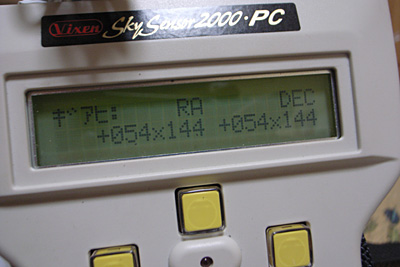 そしてSS2000PCのギア比の設定を変更します。 そしてSS2000PCのギア比の設定を変更します。
もともと36×144という数値になっているのを、RA、DECとも54×144に変更するだけです。
54というのは、1.5倍のトルクアップなので36に1.5をかけた値です。

1.5倍にトルクアップしたSS2000PCの追尾精度、どのようなものになっているでしょうか。
テスト結果を以下に記します。
|
●スカイセンサー2000PCのトルクアップ撮影テスト結果
とりあえずNGC281を撮ってみました。10分の1枚画像です。
 おお、なかなかいけてるじゃないですか。 おお、なかなかいけてるじゃないですか。
1枚なのでさすがに背景は荒れていますが、結構高度のあるカシオペア付近の星雲でも、星は点像に写っています。
今日の高原はぼんやりと靄が立ちこめ、透明度は最悪。^^;
でもとりあえずガイドはできるので・・。
使用機材は以下の通り。
| 主鏡 |
BORG 77ED + レデューサー×0.85DG(合成F5.5・425mm)
BORG 7×50ファインダー |
| ガイド鏡 |
RFT80S(焦点距離400mm) + QcamPro4000 |
| 赤道儀 |
GPD赤道儀 + ビクセン スカイセンサー2000PC + HAL150
ステラナビゲータ7で制御し、対象を自動導入 |
| オートガイド |
QcamPro4000 & GuideDog
使用PC:東芝 Dynabook SS 4000
モバイルPentium3 750Mhz HDD40GBに換装 512MB RAM
Windows2000Professional |
| その他 |
平型強化プレート、誠報社ガイドマウント |
| 電源 |
カメラ・赤道儀ともSG-1000(12V7A)×2個より供給(カメラにはレギュレータ使用)
PCは軽自動車用バッテリー12V21AよりDC-ACインバータで100Vに変換して使用 |
| 画像処理 |
PhotoShop7.0、RAP、ステライメージ5 |
気になる天頂付近の追尾を試してみます。
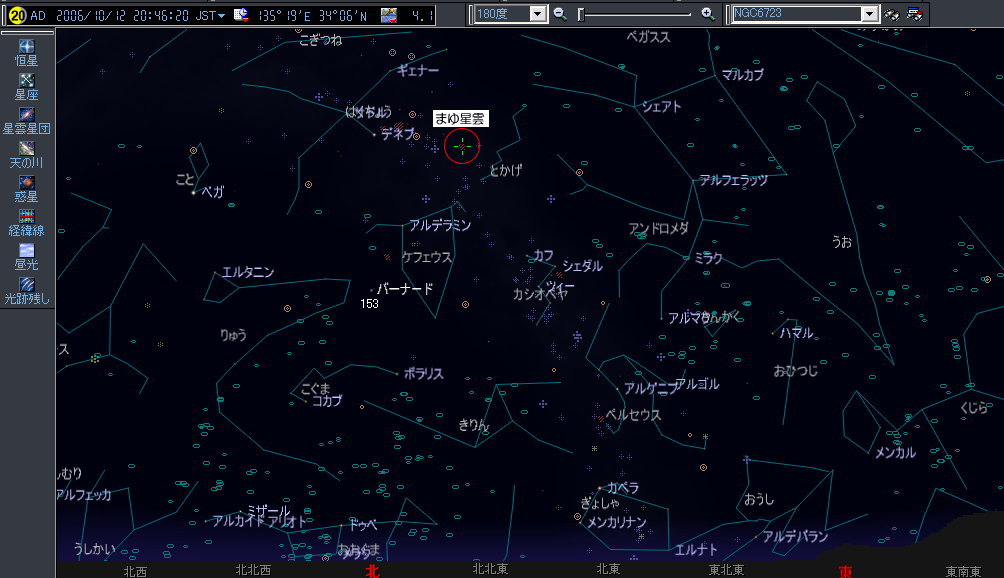
ほぼ天頂、ほぼ同じ位置に昇ったまゆ星雲を撮って見比べてみることにしました。
|
| 8月23日23:46 |
10月12日20:46 |
 |
 |
| 天頂付近に昇ったまゆ星雲の位置。ほぼ同じ位置、バランスの崩れがモロに現れる天頂付近にまで昇っています。 |
|
|
 |
 |
|
|
 |
 |
8月23日に撮った、ギア比1:1のものはかなり流れてしまっています。前後左右上下、かなりシビアにバランスを取ったつもりだったのですが・・。
10月12日撮影のギア比1:1.5にトルクアップしたものは、ほぼ点状。今回は機材のバランスをわざと少し崩してあります。 |
|
実は以前syoshi-さんにコソッとお教えいただいて、意味が良く理解できないままいたのですが・・実際にやってみると良く判った気がします。
通常モーターには負荷が常にかかっているはずなのですが、どうやら天頂では赤経・赤緯ともにギアへの負荷がゼロに近くなる位置が存在するようです。このとき、機材のバランス崩れやバックラッシュの影響がモロにでて追尾に支障が出てしまうのでしょうか。
これを回避するためには追尾とは逆方向にほんの少し多めに負荷がかかるようにウェイトをかける、あるいはバランスをわざと崩しておく必要があるという結論に行き着きました。そしてその負荷に耐えるためにモーターはトルクを上げておく必要があるように思い、今回のギア比変更を行ったのです。
とはいえこれも天頂を少し過ぎた付近まで、そのウェイトの負荷がかかっている状態でのみ有効になるでしょうか。「0ヲオシテハンテンシテクダサイ」と警告が出てから少しの間だけということになりそうです。
これはモーターを替えてもギア比を変えても同じように起こることでしょう。バックラッシュを完全にゼロにすることが必要ですが、それは実際のところ不可能ですから、天頂をまたぐ撮影はできるだけ避けたほうが良さそうです。
そうそう、1:1.5のギア比にしてもまだまだ導入は速い。消費電力の差もさほどではありません。
GuideDogの補正量もデフォルトで問題なく、撮影は快適でした。 |


 おお、なかなかいけてるじゃないですか。
おお、なかなかいけてるじゃないですか。